

Robert Sprotte
Student researcher

Andrea Leal
Student Researcher

Hani Alzraiee
advisor

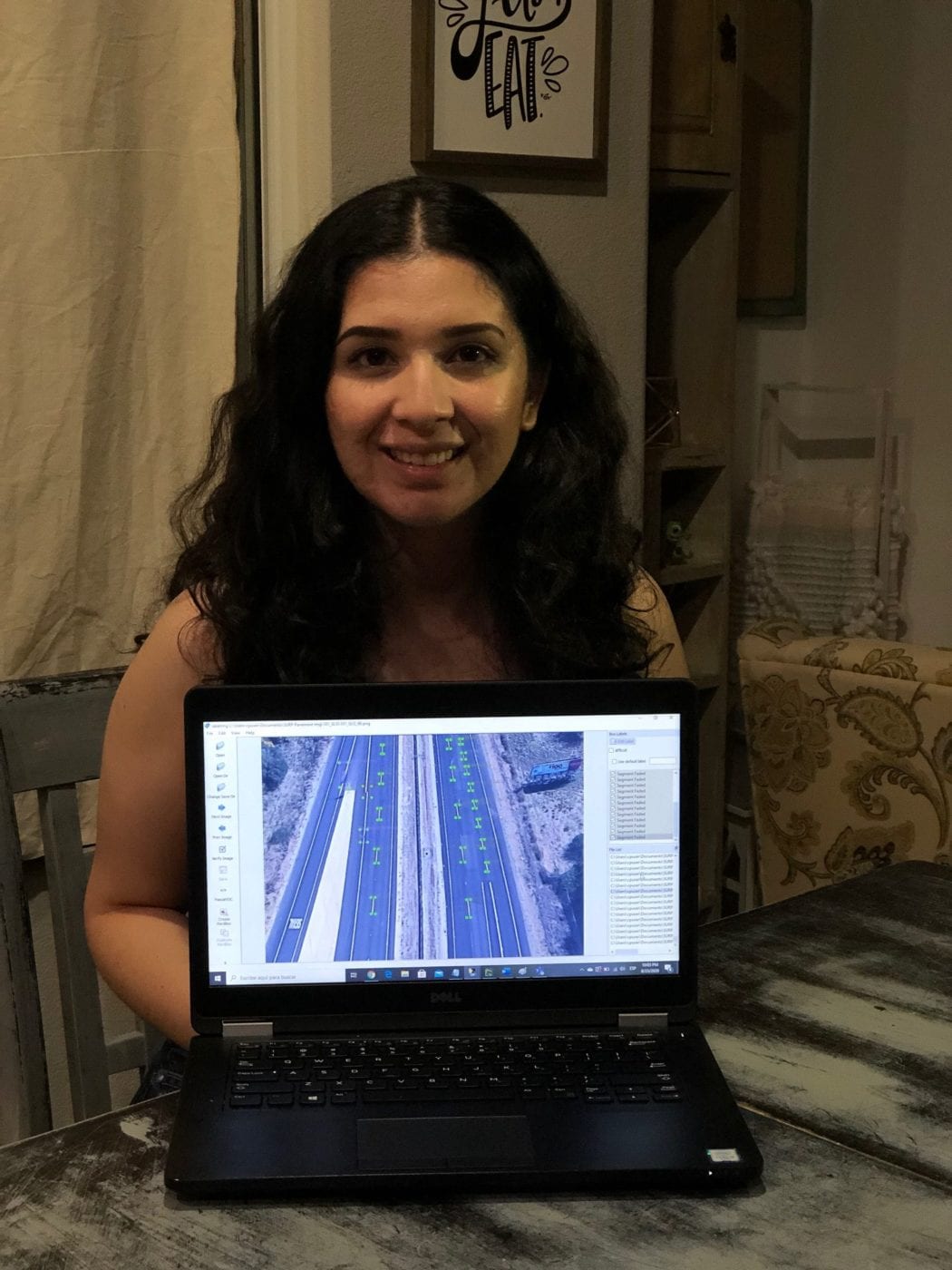
The four steps in the methodology are (1) data collection, (2) image analysis and multi-level classification, (3) R-CNN model development, and (4) model testing.
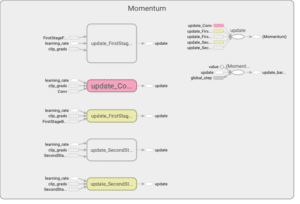
A Python-based, R-CNN model was developed using Google’s Tensorflow package for object detection. This model was modified from the original settings of a pretrained model. The layers were modified so the model could be tailored to detecting pavement marking data. The predefined model weights are also adjusted and optimized specifically for the pavement marking images Three iterations were made, each with increased data from satellite, Google images, to optimize the model to correctly detect pavement marking defects. The model was trained to detect 8 classes of pavement marking defects.




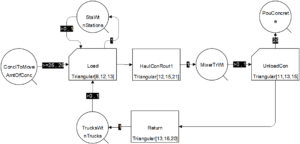
EZStrobe takes multi-step activities, such as concrete delivery, and models them as just one activity and provides a duration that represents the time it takes to perform all n steps. The model is run for each of the route alternatives and the results are analyzed and summarized to highlight the most efficient concrete delivery route.

The simulation model results determined that routes S01 and S03 (R1 and R3) are very similar with total operation times of 5.9 and 5.95 hours, respectively while S02 (R2) yields a duration of 3.1 hours. Based on the model output, R2 should be chosen over R1 or R3 for the concrete delivery in this specific task. These results highlight the impact route selection can have on the overall duration of a large concrete pour activity.
Table 1: Preliminary Results of the Simulation Model




{kind=link}
{kind=link}
{kind=link}