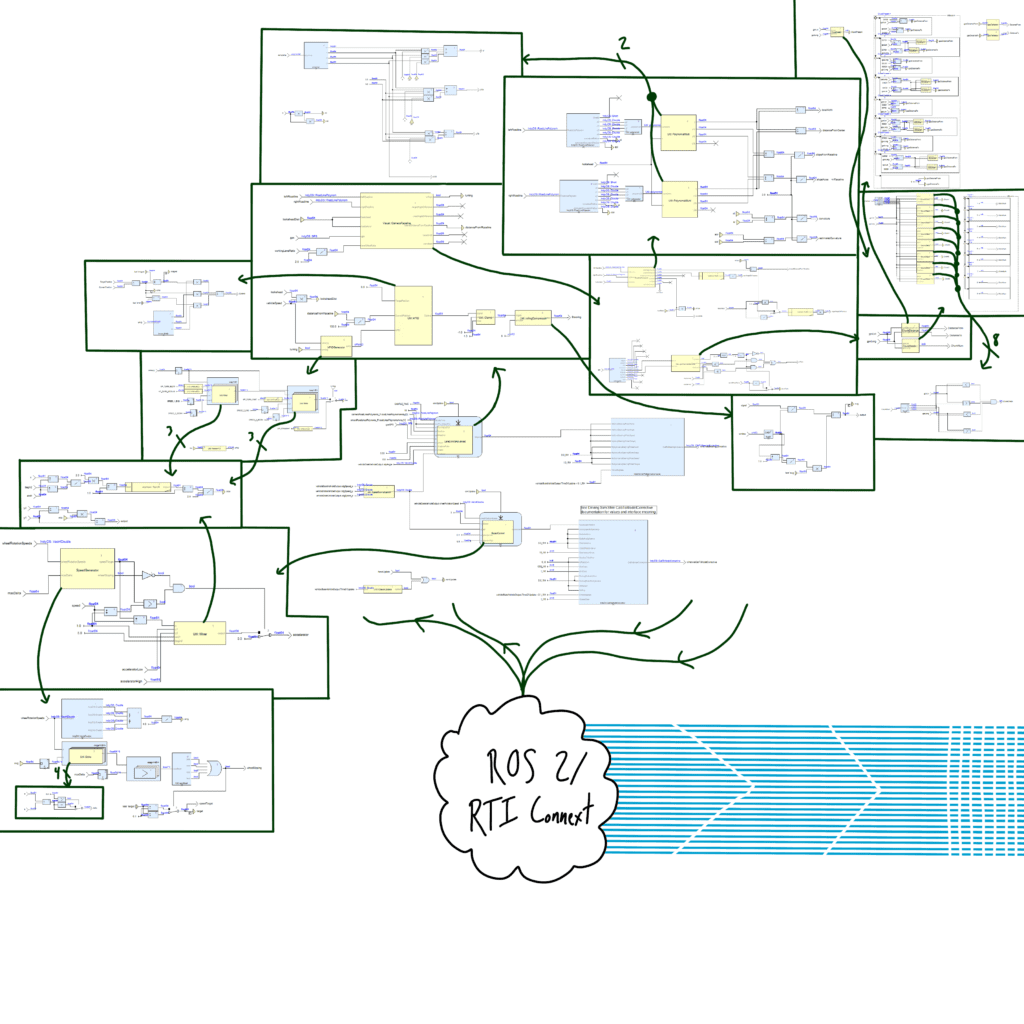
Ansys SCADE is the safety-critical software environment officially used by the challenge teams to develop the basic control systems of the vehicle. It is designed to remove room for bugs in the generated code used special code generators to translate the visual programming language to C. It can also very easily integrate with DDS environments like ROS2 or RTI Connext.
In the above image, you can see the model developed for the vehicle to some extent. All chunks in the image are screen-captured from the actual “code” of the module. After that, the connections were mapped by hand to show you the highest level web of logic that we can construct. This, in essence, is a visual summary of how to drive an Indy Car.