




Sponsor Logo here
This project is sponsored by. Northrop Grupmman
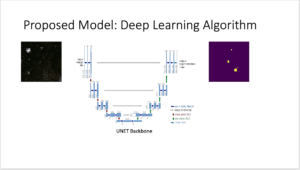
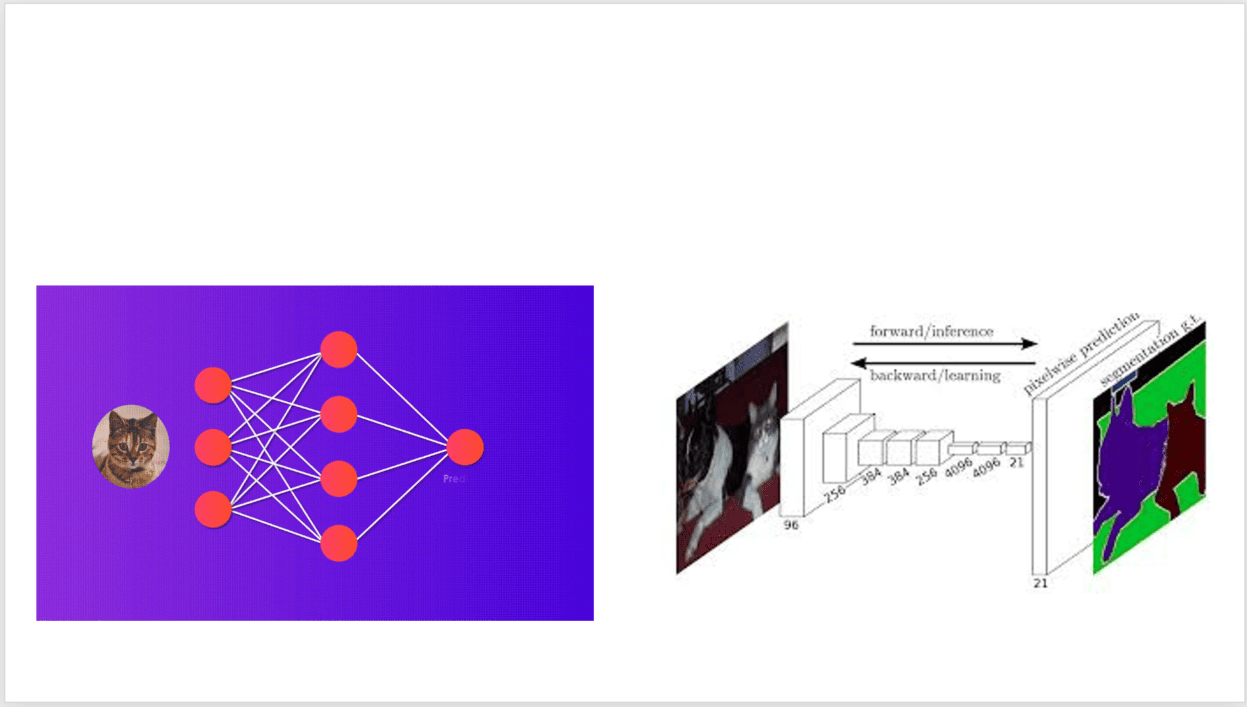
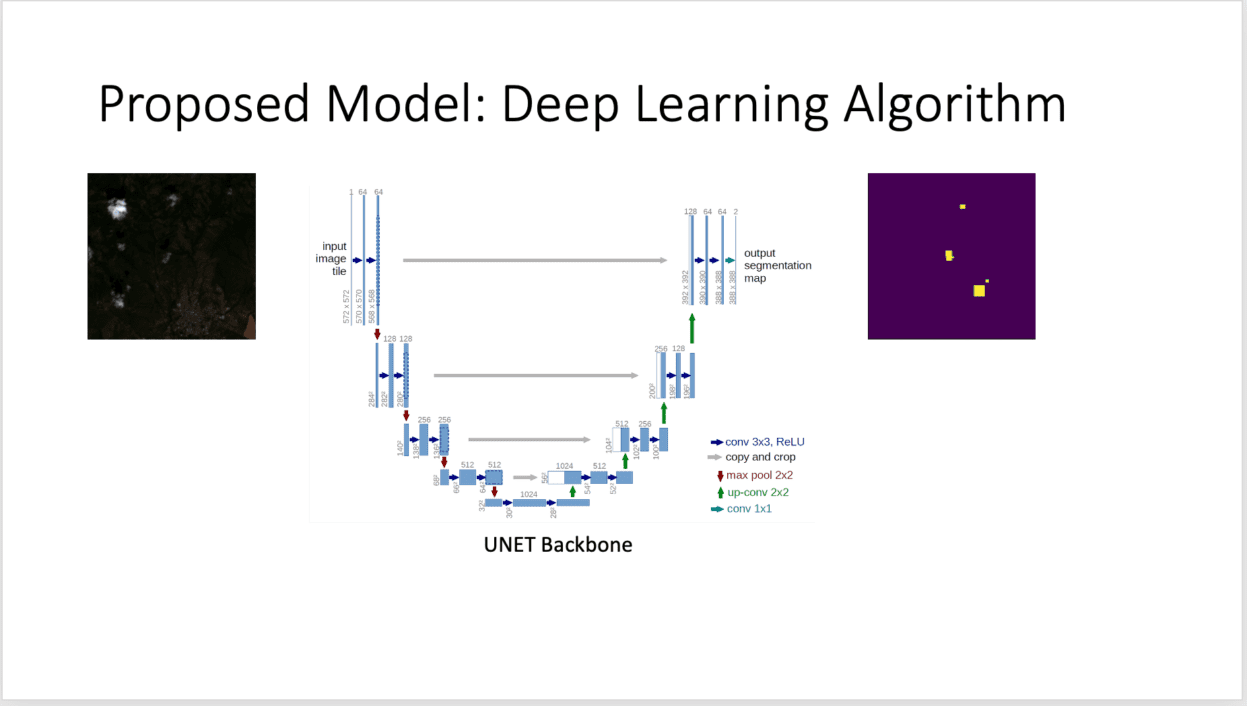
Based on U-Net Segmentation
- Initialization: He
- Image size: U-net was designed for images of size 572 × 572 × 3, our images are 256 x 245 x 11.
- Batch size: 32. To fit on GPU memory
- Activation: Relu
- Optimizer: Adam optimizer Over Gradient Descent because it converges faster.
- Loss function: Loss function: Soft Dice + Binary Cross Entropy
The loss based on the Dice coefficient is commonly used for image segmentation as it allows coping with class imbalance.
Given the evaluation metric is the mean Jaccard index over classes, it would be ideal to use Jaccard index as the loss function. Unfortunately, Jaccard index is not differentiable. Soft Jaccard index instead is differentiable and is close to Jaccard index in very confident predictions. A combination of cross entropy (H) and soft Jaccard index (J), L = H -log(J), is used as the loss function. - To make sure we don’t overfit we decided to use dropout of x every y layer
- We also use Keras callbacks to implement: Learning rate decay, early stopping if the validation loss does not improve for 10 continues epochs or reaches the desired
- Augmentation We use spacial augmentation only. Rotation, flipping, and zoom.
Experiments
Models: The models we tested against this dataset are the U-net, Unet ++, and a fully connected CNN. We chose the Unet and Unet++ for their performance in other segmentation problems as well as their popularity in satellite image segmentation. We also used the Tiramisu model for its success in segmentation and as a comparison to the Unet models.
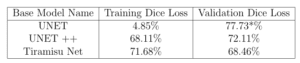 Despite having a similar validation error the Unet is the only model that would fully converge on the training set. This gave promise for its ability to learn the data and hopefully be able to overcome the issue of over fitting.
Despite having a similar validation error the Unet is the only model that would fully converge on the training set. This gave promise for its ability to learn the data and hopefully be able to overcome the issue of over fitting. As the Unet converged the validation error would fluctuate largely from , to improve this we are creating more training flights from different world areas.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}