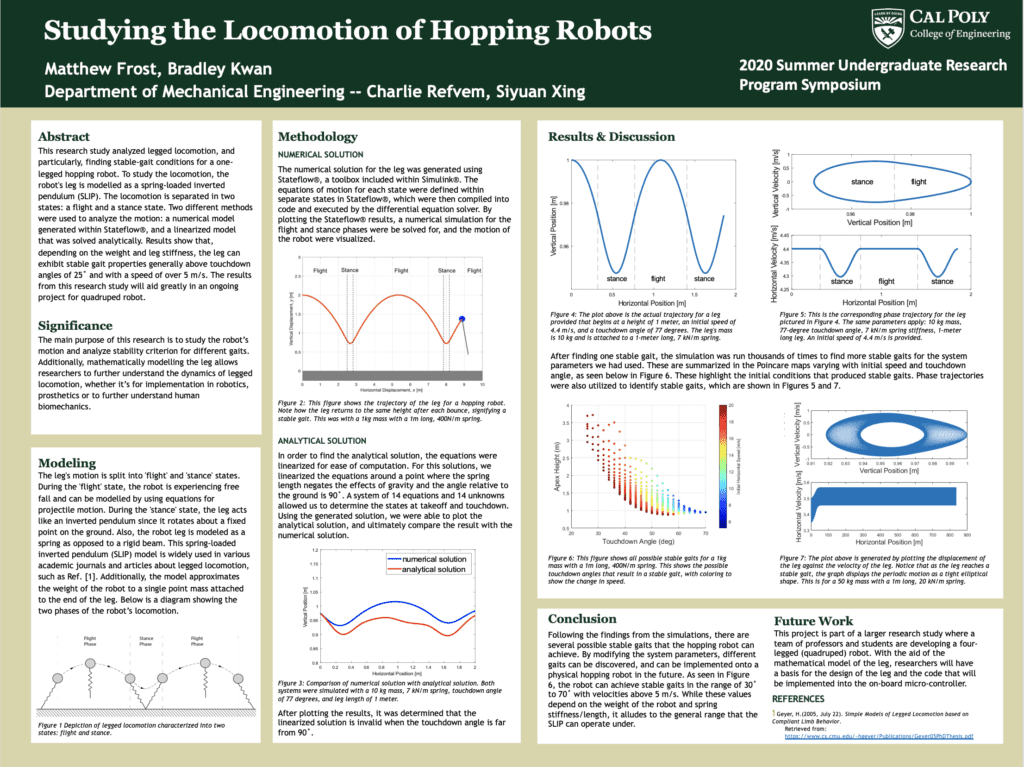
This research study analyzed legged locomotion, and particularly, finding stable-gait conditions for a one-legged hopping robot.
Our Team
The team consisted of two Mechanical Engineering students at California Polytechnic State University. Their mentors included two faculty members: Siyuan Xing and Charlie Refvem.
Matthew Frost
3rd year mechanical Engineering student
Matthew is a 3rd year undergraduate in Mechanical Engineering with a concentration in Mechatronics. His interests include magnetic-mechanical system design and system dynamics. Matthew’s project focus was on the MATLAB implementation for the numerical solution of the hopping robot and aiding in the linearized analytical model.
Bradley Kwan
5th Year Mechanical Engineering student
Bradley is a 5th year Mechanical Engineering student in the Blended Program. His interests include electro-mechanical system design and computational modelling of physical systems. Bradley aided in the implementation of the numerical solution in addition to primarily focusing on the linearized analytical model.
Project Description
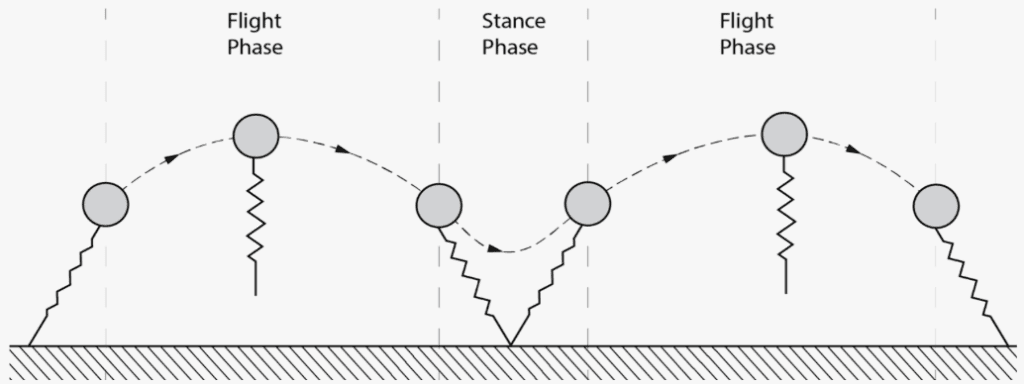
This research study analyzed legged locomotion, and particularly, finding stable-gait conditions for a one-legged hopping robot. Two different methods were used to analyze the motion: a numerical model generated within Stateflow®, and a linearized model that was solved analytically. Results show that, depending on the weight and leg stiffness, the leg can exhibit stable gait properties generally above touchdown angles of 25˚ and with a speed of over 5 m/s. The results from this research study will aid greatly in an ongoing project for quadruped robot.
Our team would like to recognize and thank our project advisors at Cal Poly: Siyuan Xing and Charlie Refvem. Siyuan and Charlie have been fantastic mentors to work alongside with, as well as reliable sources of engineering advice and consultation throughout the project—we hope this research helps your endeavors in the future of legged locomotion! We would also like to recognize Robert Crockett for organizing the entire SURP experience, especially during the COVID-19 chaos. Thank you for organizing this program!